Microrobotics Research
In the field of robotics, there have been numerous micro-robots that are considered to be small. While these robots are certainly tiny, nearly all of these robots use an external means to power their articulations. More simply, these robots don’t carry their of power source or battery to control their movements. Some of the external means of power that have been used to actuate these robots include sonic/sound, lasers, light, vibration, magnetism, and even alcohol. While this allows for the robots to be extremely small, these robots must always be powered by the external force in order to move. In contrast, I designed Dimebots to be completely self-contained and autonomous.
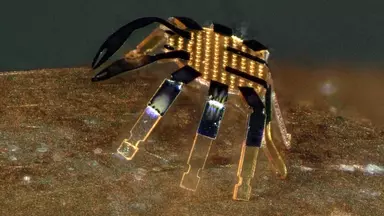
Northwestern University Robot
Magnetism Powered Robot — Max Planck Institute for Intelligent Systems
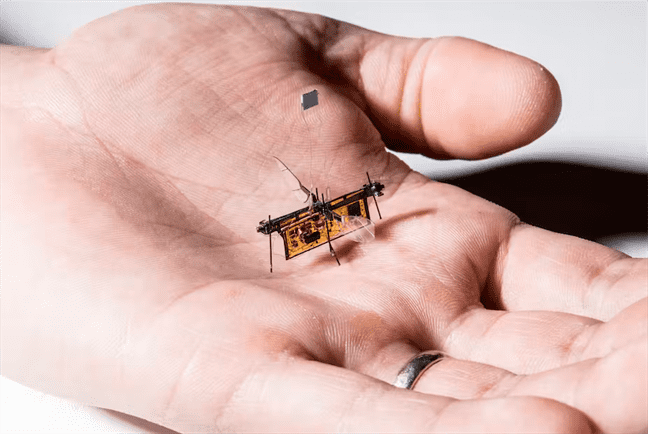
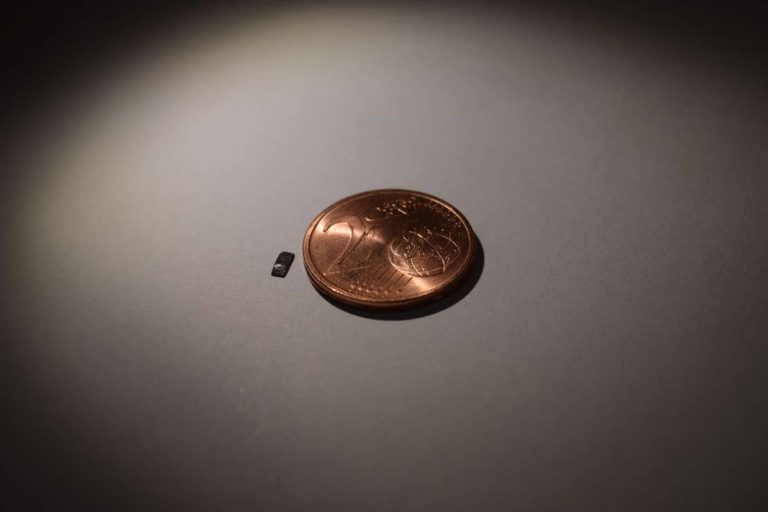
Magnetically Actuated Amphibious Origami Robot — The RoboFly from the University of Washington

Alcohol Powered Robot
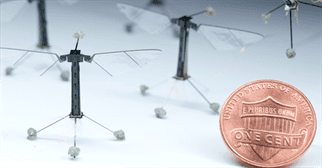
A Robot Inspired by the Biology of a Bee — RoboBee from Harvard University

Vibration Powered Robot — Georgia Institute of Technology